Könnte jemand mit dem Beweis helfen?
Habe angefangen, aber weiß nicht, was ich weiter machen kann
Text erkannt:
3. Satz von Steiner
Der Trägheitstensor \( \mathbf{J} \) ist für eine beliebige Massenverteilung \( \rho(\mathbf{x}) \) ist definiert als
\( J_{\mu \nu}:=\int d^{3} x \rho(\mathbf{x})\left[\mathbf{x}^{2} \delta_{\mu \nu}-x_{\mu} x_{\nu}\right] \)
bzw. \( \quad \mathbf{J}=\int d^{3} x \rho(\mathbf{x})\left(\begin{array}{ccc}x_{2}^{2}+x_{3}^{2} & -x_{1} x_{2} & -x_{1} x_{3} \\ -x_{1} x_{2} & x_{1}^{2}+x_{3}^{2} & -x_{2} x_{3} \\ -x_{1} x_{3} & -x_{2} x_{3} & x_{1}^{2}+x_{2}^{2}\end{array}\right) \).
Dabei ist \( \delta_{\mu \nu} \) das Kronecker Symbol und die Koordinaten \( \mathbf{x}=\left(x_{1}, x_{2}, x_{3}\right)^{T} \) beziehen sich üblicherweise auf ein körperfestes Koordinatensystem.
Bei einer Drehung mit Winkelgeschwindigkeit \( \boldsymbol{\omega}=\omega \mathbf{e}_{\text {rot }} \) um eine Drehachse \( \mathbf{e}_{\text {rot }}\left(\left\|\mathbf{e}_{\mathrm{rot}}\right\|=1\right) \) ist die Rotationsenegie dann gegeben als \( T_{\mathrm{rot}}=\frac{1}{2} \boldsymbol{\omega} \cdot \mathbf{J} \boldsymbol{\omega} \).
Die Berechnung des Trägheitstensors fällt oft leichter, wenn der Ursprung des (körperfesten) Koordinatensystems mit dem Schwerpunkt der Massenverteilung zusammenfällt. Verläuft die Drehachse nicht durch den Schwerpunkt, so hilft der Satz von Steiner, den wir hier kurz herleiten wollen.
Gegeben sei der Trägheitstensor \( \mathbf{J} \) in einem körperfesten Koordinatensystem \( \mathbf{K} \), welches seinen Ursprung im Schwerpunkt einer Masseverteilung \( \rho \) hat. Das Koordinatensystem \( \mathbf{K}^{\prime} \) ist achsenparallel zu \( \mathbf{K} \), allerdings ist der Ursprung um den Vektor a verschoben. Der Trägheitstensor in diesem neuen Koordinatensystem ergibt sich also über
\( J_{\mu \nu}^{\prime}=\int d^{3} x^{\prime} \rho^{\prime}\left(\mathbf{x}^{\prime}\right)\left[\mathbf{x}^{2} \delta_{\mu \nu}-x_{\mu}^{\prime} x_{\nu}^{\prime}\right], \)
dabei beschreibt \( \mathbf{x}^{\prime}=\mathbf{x}+\mathbf{a} \) Relation zwischen den Koordinaten und \( \rho^{\prime}(\mathbf{x}+\mathbf{a})=\rho(\mathbf{x}) \) ist die entsprechend angepasste Dichteverteilung.
(a) Beweisen Sie den Satz von Steiner wonach
\( \begin{aligned} J_{\mu \nu}^{\prime} &=J_{\mu \nu}+M\left[\mathbf{a}^{2} \delta_{\mu \nu}-a_{\mu} a_{\nu}\right] \\ \text { bzw. } \quad \mathbf{J}^{\prime} &=\mathbf{J}+M\left[\mathbf{a}^{T} \mathbf{a} \mathbf{1}-\mathbf{a} \mathbf{a}^{T}\right] \end{aligned} \)
wobei \( M \) die Gesamtmasse des Systems ist.
Hinweis: Verwenden Sie die Tatsache, dass \( \mathbf{K} \) das Schwerpunktsystem der Massenverteilung ist!
Text erkannt:
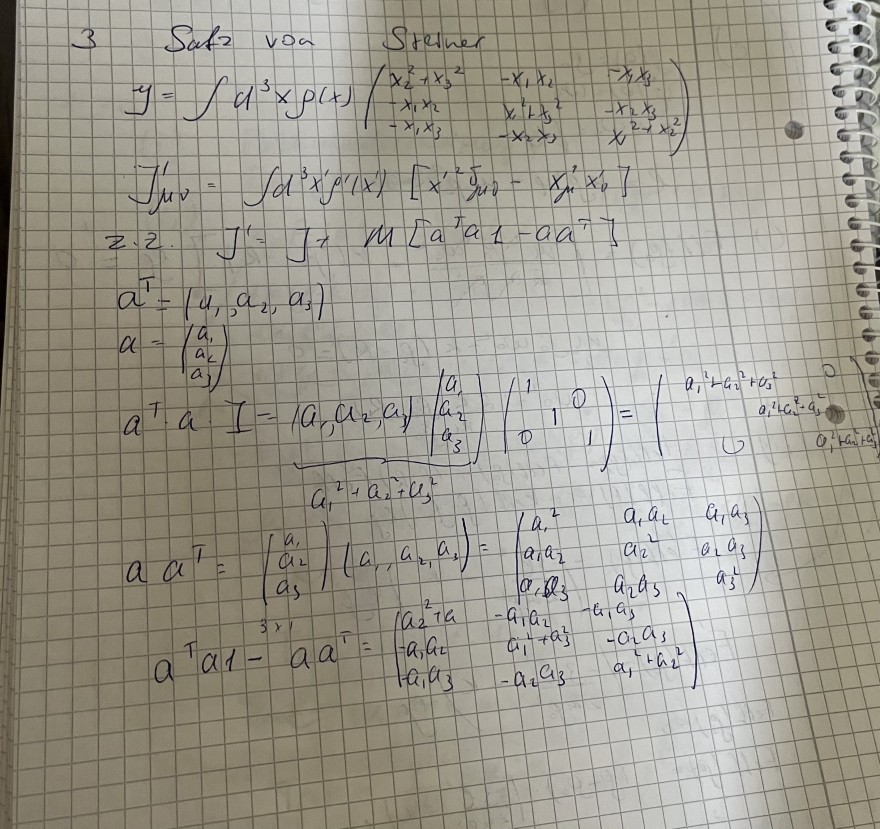
3 Satz von Stelner
\( y=\int d^{3} x \rho(x)\left(\begin{array}{ccc}x_{x_{1}^{2}+x_{3}} & -x_{1} x_{2} & -x_{1} x_{3} \\ x_{1} x_{2} & x_{1}+f_{2}^{2} & -x_{2} x_{3} \\ -x_{1}, x_{3} & -x_{2} x_{3} & x^{2}+x_{2}^{2}\end{array}\right) \)
\( J_{\mu \nu}^{\prime}=\int d^{3} x^{\prime} \rho^{\prime}(x)\left[x^{\prime 2} f_{\mu 0}-x_{\mu}^{\prime} x_{0}^{\prime}\right] \)
\( z \cdot z \quad J^{\prime}=J^{\top}+M\left[a^{\top} a 1-a a^{\top}\right] \)
\( a^{\top}=\left(1, a_{2}, a_{3}\right) \)
\( a=\left(\begin{array}{l}a_{1} \\ a_{2} \\ a_{3}\end{array}\right) \)
\( a a^{\top}=\left(\begin{array}{l}a_{1} \\ a_{2} \\ a_{3}\end{array}\right)\left(\begin{array}{lll}a_{1} & a_{2}, a_{1}\end{array}\right)=\left(\begin{array}{ccc}a_{1}^{2} & a_{1} a_{2} & a_{1} a_{3} \\ a_{1} a_{2} & a_{2}^{2} & a_{2} a_{1} \\ a_{1} a_{3} & a_{2} a_{3} & a_{1}\end{array}\right) \)
\( a^{\top} a_{1}-a_{1}^{3} a^{\top}=\left(\begin{array}{ccc}a_{2}^{2}+a & -a_{1} a_{2} & -a_{1} a_{3} a_{3} \\ a_{3} \\ a_{1} a_{2} & a_{1}+a_{3}^{2} & -a_{2} a_{3} \\ a_{1} a_{3} & -a_{2} a_{3} & a_{1}^{2}+a_{2}^{2}\end{array}\right) \)
Text erkannt:
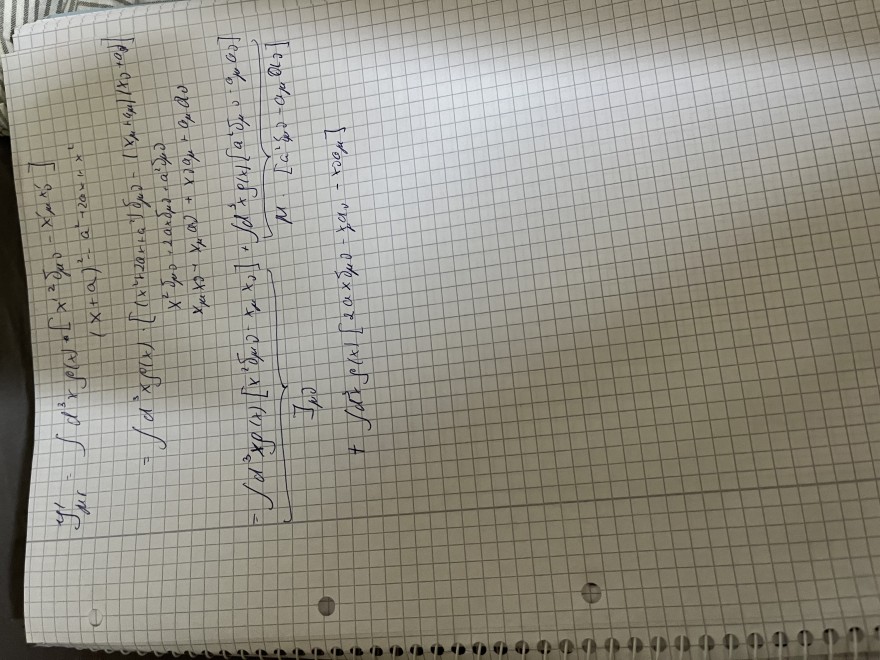
\( y_{\mu r}^{\prime}=\int d^{3} r \rho(x) *\left[x^{2} \delta_{\mu \nu}-x_{\mu} x_{0}{ }^{\prime}\right] \)
\( +\int a^{i} \rho(x)\left[2 a \times \delta_{\mu} 0-x a_{\nu}-x_{0} \mu_{\mu}\right] \)