Aufgabe 3: Transformation
Gegeben seine die folgenden D-H-Parameter und eine Stellung des Roboters im Konfigurationsraum s = (O1, O2, O3, O4)
(D-H steht für Denavit Hartenberg -> https://de.wikipedia.org/wiki/Denavit-Hartenberg-Transformation)
Achse
| O i
| di
| ai
| alpha
|
1
| O1
| d1= 100 mm
| 0
| 90°
|
2
| O2
| -d2= -50mm
| a2=200 mm
| 0°
|
3
| O3
| 0
| 0
| 90°
|
4
| O4
| d4=20mm
| 0
| -90°
|
Gegeben s = (90°,45°,45°, 180°)
Ermitteln Sie für die gegebene Konfiguration s die Position des Endeffektors in Basiskoordinaten!
Errechnen Sie dazu:
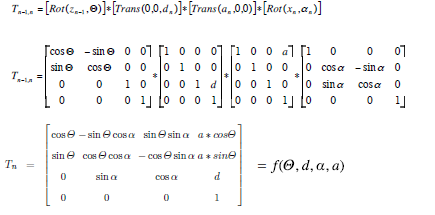
-die vier D-H-Matrizen T1, T2, T3, T4
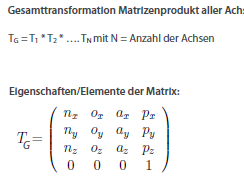
- die Gesamttransformation TG
Unten sind die Formeln gegeben. Kann mir jemand helfen.