Aufgabe:
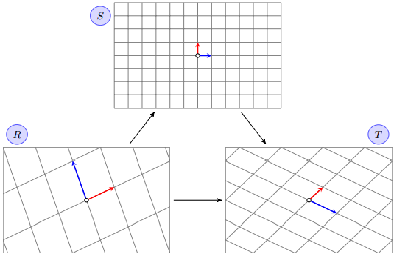
Es seien die drei Basen R = {r1, r2}, S = {s1, s2} (Standardbasis) und T = {t1, t2} des Vektorraums
V = R2 gegeben:
r1 = (−1, 3), r2 = (2, 1); s1 = (1, 0), s2 = (0, 1); t1 = (2, −1), t2 = (1, 1).
Für v ∈ V bezeichnen wir mit vR := γR(v) den Koordinatenvektor von v bzgl. der Basis R (und
dementsprechend vS, vT für die Koordinatenvektoren bzgl. der beiden anderen Basen).
a) Bestimmen Sie für v = (x, y) ∈ R2 die beiden Koordinatenvektoren vR und vT (in Abhängigkeit
von x, y ∈ R).
b) Bestimmen Sie diejenige Matrix M ∈ R2×2 , für die M · vR = vT für alle Vektoren v ∈ V gilt.
Text erkannt:
8
\( 1+2 \pi \)
\( \sqrt[-1]{\frac{1}{1} \cdot \sqrt{1}}{1} \)
wie kann man hier die Koordinatenvektoren und Abbildungsmatrix bestimmen.
Ich bin mir irgendwie total unschlüssig, wie ich an die Sache heran gehen soll. Wäre cool, wenn mir jemand helfen könnte :)