Scheint mir a weng aufwändig über Spiegelungen zu gehen. Wenn Urbild und Bild gegeben sind, dann finde ich den Drehpunkt über den Schnittpunkt der Mittelsenkrechten zwischen Urbild- und Bildpunkte.
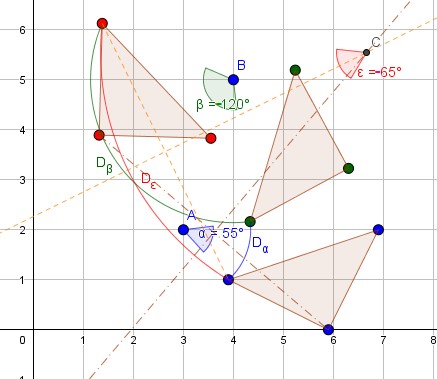
ε = α + β
Rechnerisch sind Drehungen durch Matrizen beschrieben
\(\small D(\alpha) = \left( \begin{array}{rr}\operatorname{cos} \left( \alpha \right)&-\operatorname{sin} \left( \alpha \right)\\\operatorname{sin} \left( \alpha \right)&\operatorname{cos} \left( \alpha\right)\\\end{array}\right) \)
\(\small D(α)D(β) =\left(\begin{array}{rr}\operatorname{cos} \left( \alpha \right) \; \operatorname{cos} \left( \beta \right) - \operatorname{sin} \left( \alpha \right) \; \operatorname{sin} \left( \beta \right)&-\operatorname{cos} \left( \alpha \right) \; \operatorname{sin} \left( \beta \right) - \operatorname{cos} \left( \beta \right) \; \operatorname{sin} \left( \alpha \right)\\\operatorname{cos} \left( \alpha \right) \; \operatorname{sin} \left( \beta \right) + \operatorname{cos} \left( \beta \right) \; \operatorname{sin} \left( \alpha \right)&\operatorname{cos} \left( \alpha \right) \; \operatorname{cos} \left( \beta \right) - \operatorname{sin} \left( \alpha \right) \; \operatorname{sin} \left( \beta \right)\\\end{array}\right)=\\\left(\begin{array}{rr}\operatorname{cos} \left( \alpha + \beta \right)&-\operatorname{sin} \left( \alpha + \beta \right)\\\operatorname{sin} \left( \alpha + \beta \right)&\operatorname{cos} \left( \alpha + \beta \right)\\\end{array}\right)\)
Einbeziehen der Drehpunkte z.B.
\(\left(\begin{array}{rr}\operatorname{cos} \left( \epsilon \right)&-\operatorname{sin} \left( \epsilon \right)\\\operatorname{sin} \left( \epsilon \right)&\operatorname{cos} \left( \epsilon \right)\\\end{array}\right) \left(\vec{x}-C\right) + C\)
oder in homogenen KO bringt man alles in einer Matrix unter...