ich bin seit einigen Tagen vor einem Problem.
Folgende Situation:
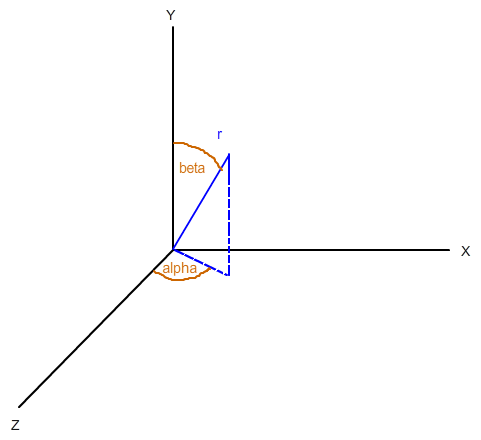
Ich habe einen Vektor im 3D Raum beschrieben mit der Länge( r) und 2 winkel( alpha, beta (siehe skizze)), wobei alpha den Winkel von der projektion des Vektors auf der XZ-Ebene bestimmt und beta denk winkel zur Y-Achse. Meines Wissens nach sollte dies ausreichend sein um jeden Punkt im Raum beschreiben zu können. nun Will ich den Vektor beispielsweise um die x,y und z achse um 10° rotieren. Wenn ich um Y rotieren möchte, muss ich ja lediglich alpha um 10° in die gewünschte richtung ändern.
Jetzt zum eigentlichen Problem:
Ich möchte den Vektor, bzw. der Punkt der daraus resultiert auch um die X und Z Achse rotieren (z.B. um 10°), hab jedoch keine Ahnung wie, oder was für eine Formel ich benötige, da eine rotation um X als auch um Z ja jeweils Einfluss auf beide Winkel haben muss.
Meine Internet-Recherchen waren leider allesamt erfolglos, da ich mein Problem nicht richtig beim Namen nennen kann, ich hoffe ihr könnt mir da weiterhelfen. Zum besseren Verständnis noch eine kleine Skizze.
:)