Aufgabe:
Es soll eine Art allgemeingültige Transformationsmatrix für Givensrotationen bei 2x2 Matrizen aufgestellt werden. Meine Frage bezieht sich AUSSCHLIESSLICH auf den Aufgabenteil c), der Rest der Aufgabe ist nur für den Kontext drin.
Problem/Ansatz:
Das Handgeschriebene ist mein Ansatz, mit dem komme ich allerdings nicht weiter. Hat jemand eine andere Idee oder weiß wie ich mit meinem Ansatz weiterkomme? 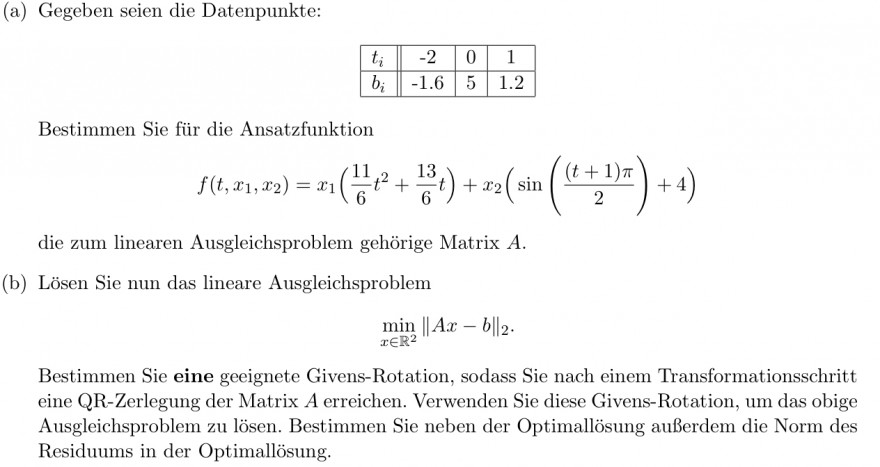
Text erkannt:
(a) Gegeben seien die Datenpunkte:
\begin{tabular}{|c||c|c|c|}
\hline\( t_{i} \) & -2 & 0 & 1 \\
\hline\( b_{i} \) & -1.6 & 5 & 1.2 \\
\hline
\end{tabular}
Bestimmen Sie für die Ansatzfunktion
$$ f\left(t, x_{1}, x_{2}\right)=x_{1}\left(\frac{11}{6} t^{2}+\frac{13}{6} t\right)+x_{2}\left(\sin \left(\frac{(t+1) \pi}{2}\right)+4\right) $$
die zum linearen Ausgleichsproblem gehörige Matrix \( A \).
(b) Lösen Sie nun das lineare Ausgleichsproblem
$$ \min _{x \in \mathbb{R}^{2}}\|A x-b\|_{2} $$
Bestimmen Sie eine geeignete Givens-Rotation, sodass Sie nach einem Transformationsschritt eine QR-Zerlegung der Matrix \( A \) erreichen. Verwenden Sie diese Givens-Rotation, um das obige Ausgleichsproblem zu lösen. Bestimmen Sie neben der Optimallösung außerdem die Norm des Residuums in der Optimallösung.
Text erkannt:
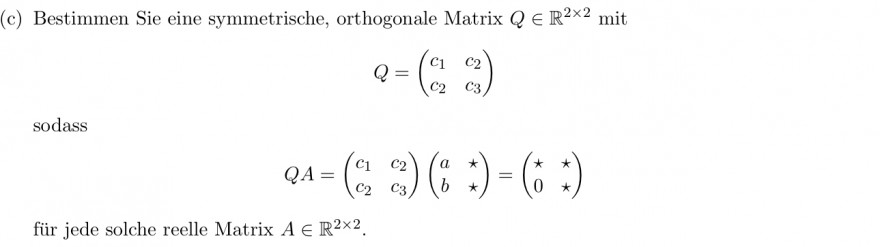
(c) Bestimmen Sie eine symmetrische, orthogonale Matrix \( Q \in \mathbb{R}^{2 \times 2} \) mit
$$ Q=\left(\begin{array}{ll} c_{1} & c_{2} \\ c_{2} & c_{3} \end{array}\right) $$
sodass
$$ Q A=\left(\begin{array}{ll} c_{1} & c_{2} \\ c_{2} & c_{3} \end{array}\right)\left(\begin{array}{ll} a & \star \\ b & \star \end{array}\right)=\left(\begin{array}{ll} \star & \star \\ 0 & \star \end{array}\right) $$
für jede solche reelle Matrix \( A \in \mathbb{R}^{2 \times 2} \).
