Es tut mir wirklich leid, dass ich bei diesem Thema eventuell etwas "schwerfällig" bin.
Gut, dann ziehe ich das mal ganz anders auf. Nehmen wir doch mal einen Vekor im Raum:
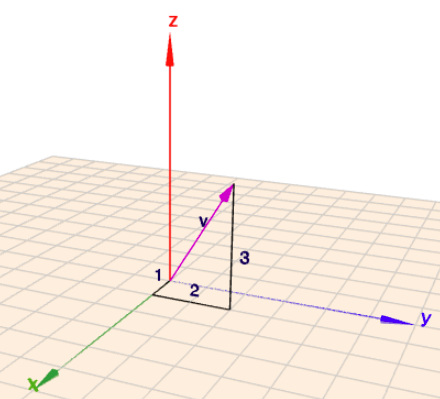
$$v = \begin{pmatrix}1\\ 2\\ 3\end{pmatrix}$$Dieses Ding 'Vektor' ist eine gerichtete Größe. In der Physik werden damit z.B. Geschwindigkeiten, Kräfte oder auch Feldlinien beschrieben.
Wenn Du aber wissen möchtest wie lang der Vektor ist, also wissen möchtest wie schnell ein Auto, wie groß die Kraft oder wie ausgeprägt eine Feldlinie an einer bestimmten Stelle ist, dann benötigst Du die Länge \(l\) des Vektors. Und diese Länge berechnet sich (nach Pythagoras!) aus der Wurzel der Quadratesumme der Koordinaten. Hier:$$l =|\vec v| = \sqrt{1^2 + 2^2 +3^2}$$Wenn Du den Pythagoras da nicht siehst, versuche es bitte mal mit einem Vektor in der Ebene!
Diese Quadratesumme ist aber identisch zum Skalarprodukt des Vektors mit sich selbst:$$|\vec v| = \sqrt{\vec v^2}= \sqrt{\vec v^T \cdot \vec v} \\ \quad= \sqrt{\begin{pmatrix}1& 2& 3\end{pmatrix} \cdot \begin{pmatrix}1\\ 2\\ 3\end{pmatrix}} =\sqrt{1^2 + 2^2 +3^2} $$In der Praxis wird dieses \({}^T\) beim ersten Vektor oft weg gelassen. Du wirst sicher häufiger \(\vec a \vec b\) lesen als \(\vec a^T \vec b\) lesen. Aber gemeint ist immer das zweite.
In unseren konkreten Fall ist ein Vektor \(\vec d\) von einem Punkt der Geraden zu einem Punkt auf der anderen Geraden, die Differenz dieser beiden Punkte:$$\vec d = \vec g(s) - \vec h(t) = s\vec r_g - t\vec r_h - \Delta \vec p$$Was nun interessiert, ist die Länge von \(\vec d\). Es soll ja die Stelle gefunden werden, an der die Länge von \(\vec d\) und damit der Abstand zwischen den Geraden minimal wird. Folglich betrachten wir$$|\vec d| = \sqrt{\vec d^2}$$Und da das Maximum der Wurzel auch das Maximum des Quadrats ist, betrachten wir der Einfachheit halber nur das Quadrat:$$|\vec d|^2 = \vec d^2 = e(s,t)$$Und die Berechnung der Quadratesumme ändert sich dadurch ja nicht. Also ist$$e(s,t) = d_x^2 + d_y^2 + d_z^2$$Und jetzt setze für \(d_x\), \(d_y\) und \(d_z\) wieder die Ausdrücke \(s\vec r_{gx} - t\vec r_{hx} - \Delta \vec p_{x}\), \(s\vec r_{gy} - t\vec r_{hy} - \Delta \vec p_{y}\) und \(s\vec r_{gz} - t\vec r_{hz} - \Delta \vec p_{z}\) ein. Und damit kommst Du zu dieser Gleichung oben.
beziehungsweise:
\((\vec r_g - \vec r_h)^2 \) == \( \begin{pmatrix} (r_{gx} - r_{hx})^2\\(r_{gy} - r_{hy})^2 \\(r_{gz} - r_{hz})^2 \end{pmatrix} \)
Nein - die Gleichung ist Unsinn! \((\vec r_g - \vec r_h)^2 \) ist das Quadrat der Länge der Differenz von \(\vec r_g\) und \(\vec r_h\). Und eine Länge, bzw. das Quadrat einer Länge, ist kein Vektor!
\((\vec r_g - \vec r_h)^2 \)
≠:
\((r_{gx} - r_{hx})^2+(r_{gy} - r_{hy})^2 +(r_{gz} - r_{hz})^2 \)
Nein - das ist gleich. Das ist simpler Pythagoras!
Bitte bitte schau Dir noch mal die Matrizenmultiplikation an. In der Addition werden die Koordinaten der Vekoren jeweils addiert $$\begin{pmatrix}1\\ 2\\ 3\end{pmatrix} + \begin{pmatrix}4\\ 5\\ 6\end{pmatrix} = \begin{pmatrix}1 +4\\ 2+5\\ 3+6\end{pmatrix}$$Bei der Muliplikation ist das nicht(!) so.
So eine Multiplikation:$$\begin{pmatrix}1\\ 2\\ 3\end{pmatrix} \cdot \begin{pmatrix}4\\ 5\\ 6\end{pmatrix} = \text{undefiniert!}$$gibt es gar nicht. Es gibt aber das Skalarprodukt$$\begin{pmatrix}1& 2& 3\end{pmatrix} \cdot \begin{pmatrix}4\\ 5\\ 6\end{pmatrix} = 1\cdot 4 + 2\cdot 5 + 3\cdot 6$$Und genauso ist$$\begin{pmatrix}a& b\\ c& d\end{pmatrix} \cdot \begin{pmatrix}u& v\\ w& x\end{pmatrix} = \begin{pmatrix}au+bw& av+bx\\ cu+dw& cv+dx\end{pmatrix}$$Jedes Element des Produkts rechts ist das Skalarprodukt eines Zeilenvektors der ersten Matrix mit eine Spaltenvektor der zweiten Matrix$$\begin{array}{cc}{}& \begin{pmatrix}u\quad& \quad{\color{red}v}\\ {w}\quad& \quad{\color{red}x}\end{pmatrix}\\ \begin{pmatrix}{\color{red}a}& {\color{red}b}\\ c& d\end{pmatrix}& \begin{pmatrix}{\color{grey}au+bw}& {\color{red}av+bx}\\ {\color{grey} cu+dw}& {\color{grey}cv+dx}\end{pmatrix}\end{array}$$Also hier ist $$\begin{pmatrix}a& b\end{pmatrix} \cdot \begin{pmatrix}v\\ x\end{pmatrix} = av+bx$$Schau Dir mal ein Video über Matrizenmultiplikation an.