Aufgabe:
Text erkannt:
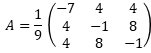
\( A=\frac{1}{9}\left(\begin{array}{ccc}-7 & 4 & 4 \\ 4 & -1 & 8 \\ 4 & 8 & -1\end{array}\right) \)
1) Zeige das A Element in SO(3) ist.
2) Bestimme Drehachse und Drehwinkel
Problem/Ansatz:
a) wie zeigt man das A in Element SO(3) ist?
b) was ist SO(3) einfach erklärt?
c) Wie bestimmt man bei einer Matrix den Drehwinkel? Was hat das 1/9 vor der Matrix für einen Effekt?
d) Wenn man den Drehachse hat, wie kommt man dann auf den Drehwinkel?
Folgendes habe ich schon errechnet:
Determinante von A = 729
Eigenwerte x1 = 9 und x2 = -9
Eigenvektoren:

Text erkannt:
\( v_{2}=x_{2} *\left(\begin{array}{c}-4 \\ 1 \\ 1\end{array}\right) \)
würde mich freuen wenn jemand das Vorgehen am Lösungsweg erklären könnte.
VG coffee.cup