Hallo Rike,
Dreht man ein Koordinatensystem um die Z-Achse um den Winkel \(\Theta\), so kann man das neu entstandene Koordinatensystem (1-System) bezogen auf das vorherige (0-Sytem) wie folgt beschreiben: $$^0T_1=\begin{pmatrix} \cos \Theta & -\sin\Theta & 0 \\ \sin\Theta & \cos\Theta & 0 \\ 0 & 0 & 1 \end{pmatrix}$$ die erste Spalte dieser Matrix beschreibt die Lage der neuen X-Achse \(^1\vec{n}\) im alten System. Ich nenne sie hier \(\vec{n}\) für Normalrichtung.
damit kann man jetzt Koordinaten, die im neuen System (1-System) angegeben sind, in das alte (0-System) in das umrechnen. Allgemein gilt $$^0\vec{x}=^0T_1\cdot ^1\vec{x}$$ Da wir später aber die Transformation von alt nach neu benötigen, berechnen wir die Inverse. In diesem Sonderfall ist die Inverse gleich der Transponierten. Es gilt $$^1T_0={(^0T_1)}^{-1}={^0T_1}^{T}=\begin{pmatrix} \cos \Theta & \sin\Theta & 0 \\ -\sin\Theta & \cos\Theta & 0 \\ 0 & 0 & 1 \end{pmatrix}$$ Ich habe die drei Systeme mit 1, 2 und 3 benannt. Das dritte ist das n-System aus Deiner Aufgabe. Anbei die konkreten Werte:
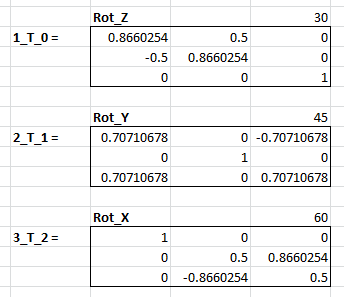
Die gesuchte Drehmatrix D ist nun identisch mit \(^3T_0\). Es gilt $$D=^3T_0=^3T_2\cdot^2T_1\cdot^1T_0$$
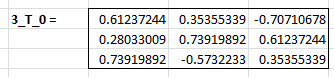
Ein Punkt \(^0P\) im alten Sytem (0-System) lässt sich nun in das neue (3-System) umrechnen $$^3P=^3T_0\cdot ^0P= ^3T_0\cdot\begin{pmatrix} 3 \\ -2 \\ 5 \end{pmatrix} \approx \begin{pmatrix} -2,406 \\ 2,424 \\ 5,132 \end{pmatrix}$$
Den Winkel zwischen neuer Y-Achse und alter Z-Achse bekommt man aus dem Skalarprodukt der beiden Achsen. Es ist dabei egal in welchem System man rechnet! Da ich beide Achsen nur im 3'er-System zur Verfügung habe - nehme ich dies her. Ich nenne die Y-Achse \(\vec{o}\) und die Z-Achse \(\vec{a}\). Aus der Matrix oben lässt sich herauslesen $$\vec{o}_3 \cdot ^3\vec{a}_0=\begin{pmatrix} 0\\ 1\\ 0\end{pmatrix} \cdot \begin{pmatrix} -0,707\\ 0,612\\ 0,354\end{pmatrix}=0,612$$ D.h. der Winkel beträgt etwa 52,2°.
Zur Schreibweise mit den führenden Indizes siehe auch hier: Denavit-Hartenberg
Gruß Werner