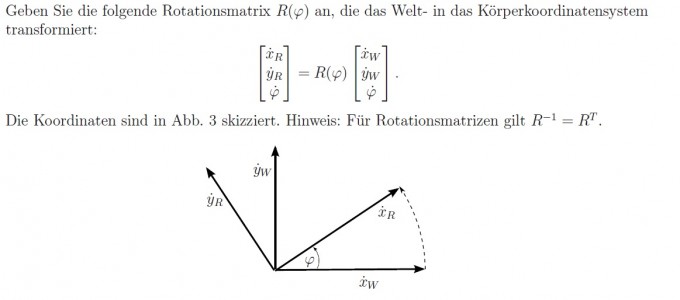
Also, es geht um einen rotierenden Roboter, auf dem ein eigenes Koordinatensystem xr, yr markiert ist. Nun soll die Rotationsmatrix erstellt werden. Mich irritiert an dieser Stelle, dass die Änderung der Koordinaten aufgetragen wird, also die erste Ableitung... wie wird das hier gemacht?